
Research
Find all my articles on my Google Scholar profile.
Contact-aware Path Planning for Autonomous Neuroendovascular Navigation
R-AL, 2026
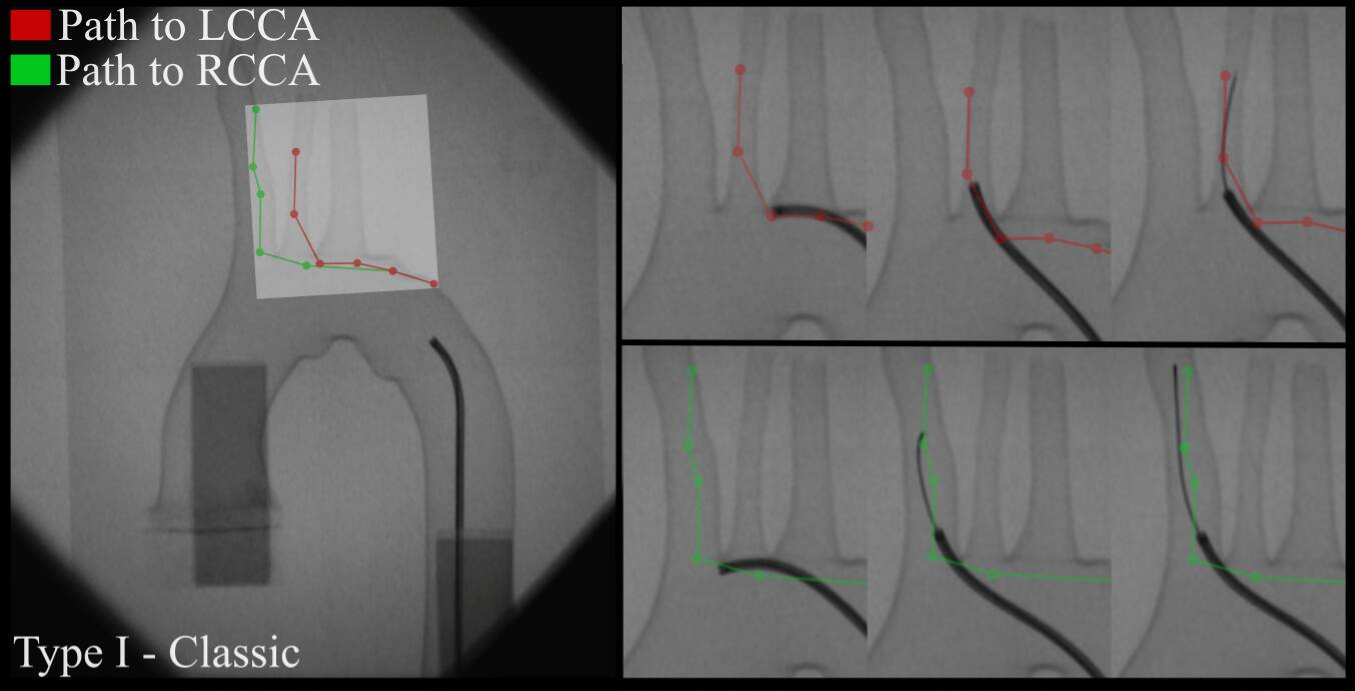
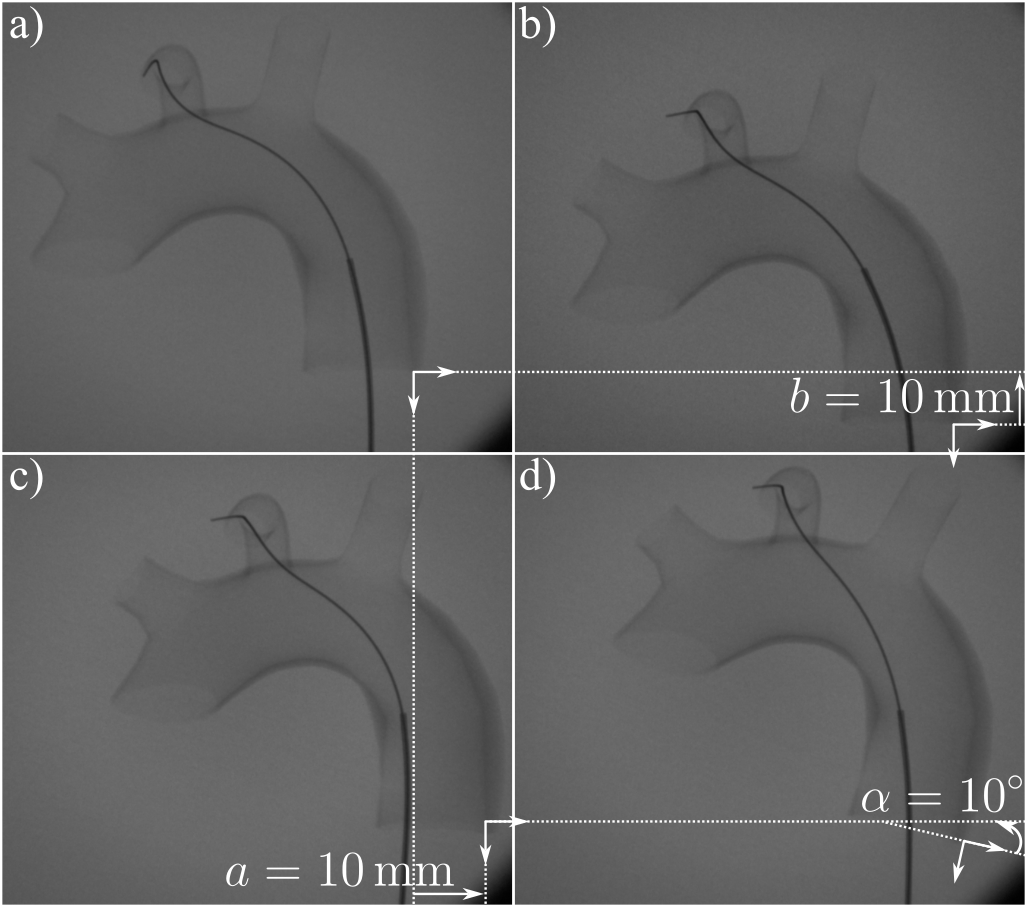
We propose a deterministic and time-efficient contact-aware path planner for neurovascular navigation. The algorithm leverages information from pre- and intra-operative images of the vessels to navigate pre-bent passive tools, by intelligently predicting and exploiting interactions with the anatomy. A kinematic...
Towards Autonomous Navigation of Neuroendovascular Tools for Timely Stroke Treatment via Contact-Aware Path Planning
ISMR, 2025
In this paper, we propose a model-based contactaware motion planner for autonomous navigation of neuroendovascular tools in acute ischemic stroke. The planner is designed to find the optimal control strategy for telescopic pre-bent catheterization tools such as guidewire and catheters,...